
![]()
N. B.!: правильные ответы на вопросы рекомендую искать в конспекте лекций, методичках для практических и лабораторных работ и в доступной литературе и учебниках, так как лучший ответ — тот, который дал сам преподаватель. В крайнем случае ответы можно искать в Интернете, но нужно быть внимательным, потому что правильный ответ должен быть простым, понятным и максимально точным — прямо отвечать на поставленный вопрос и не должен содержать ничего лишнего.
Не забывай писать в конце каждого ответа (курсивом, в скобках, справа), откуда информация.
Оглавление автособираемое — составляется автоматически. На пункты оглавления можно кликать курсором (Ctrl+Клик в классическом приложении Word, просто клик в Word Online). Используй его для быстрого перехода к ответу.
Чтобы редактировать документ в приложении Word на компьютере — войди в OneDrive со своей учётной записью Микрософт.
Если возникнут какие-либо вопросы или проблемы — пиши на spotlessmind@live.ru, разберёмся.
Оглавление
|
Правильные ответы на вопросы к экзамену по дисциплине «Электропривод» …………………………………….. |
3 |
|
|
1. |
Дайте определение электропривода (ЭП) и приведите его функциональную схему. …………………………… |
3 |
|
2. |
Кратко о этапах и истории развития ЭП. …………………………………………………………………………………………….. |
5 |
|
3. |
Классификация ЭП…………………………………………………………………………………………………………………………….. |
6 |
|
4. |
Основные требования к ЭП. ………………………………………………………………………………………………………………. |
7 |
|
5. |
Основные направления развития ЭП. ………………………………………………………………………………………………… |
8 |
|
6. |
Основные преимущества ЭП. …………………………………………………………………………………………………………….. |
9 |
|
7. |
Характеристики моментов действующих в ЭП. (Стр. 26) ……………………………………………………………………. |
10 |
|
8. |
Дайте понятия и определения активных и реактивных моментов. ……………………………………………………. |
11 |
|
9. |
Классификация механических характеристик рабочих машин и электродвигателей………………………….. |
12 |
|
10. |
Дайте определение жёсткости механических характеристик ЭП и приведите их конкретные примеры.13 |
|
|
11. |
Кинематические схемы и параметры механической части ЭП…………………………………………………………… |
14 |
|
12. |
Расчётные схемы механической части ЭП. ……………………………………………………………………………………….. |
15 |
|
13. |
Приведите связь между моментом инерции и маховым моментом механической части ЭП……………… |
16 |
|
14. |
Вывод уравнения движения ЭП……………………………………………………………………………………………………….. |
17 |
|
15. |
Структурная схема одномассового ЭП. …………………………………………………………………………………………….. |
18 |
|
16. |
Структурная схема двухмассового ЭП. ……………………………………………………………………………………………… |
19 |
|
17. |
Статическая устойчивость ЭП. ………………………………………………………………………………………………………….. |
20 |
|
18. |
Динамическая устойчивость ЭП……………………………………………………………………………………………………….. |
21 |
|
19. |
Механические характеристики ДПТ независимого и параллельного возбуждения. …………………………… |
22 |
|
20. |
Механические характеристики ДПТ последовательного возбуждения. …………………………………………….. |
23 |
|
21. |
Механические характеристики ДПТ смешанного возбуждения…………………………………………………………. |
24 |
|
22. |
Способы пуска и реверса ДПТ………………………………………………………………………………………………………….. |
25 |
|
23. |
Рабочие характеристики ДПТ…………………………………………………………………………………………………………… |
27 |
|
24. |
Вывод механической характеристики АД…………………………………………………………………………………………. |
28 |
|
25. |
Основные характерные точки механической характеристики АД………………………………………………………. |
29 |
|
26. |
Основные условия создания вращающегося электромагнитного поля как в трёхфазном так и |
|
|
однофазном АД. Вращение полей пояснить графиками…………………………………………………………………………… |
30 |
|
|
1 |
|
27. |
Механические характеристики АД в 1 фазном режиме. ……………………………………………………………………. |
32 |
|
|
28. |
Схемы пуска трёхфазных АД в 1 фазном режиме и их особенности…………………………………………………… |
33 |
|
|
29. |
Механическая и угловая характеристика синхронного двигателя. …………………………………………………….. |
34 |
|
|
30. |
Способы пуска и реверса АД и синхронных двигателей. …………………………………………………………………… |
35 |
|
|
31. |
Тормозные режимы ДПТ…………………………………………………………………………………………………………………. |
36 |
|
|
32. |
Тормозные режимы трёхфазных асинхронных двигателей……………………………………………………………….. |
38 |
|
|
33. |
Основные показатели регулирования угловой скорости электропривода. ………………………………………… |
39 |
|
|
34. |
Методы регулирования ДПТ. …………………………………………………………………………………………………………… |
40 |
|
|
35. |
Средства регулирования ДПТ…………………………………………………………………………………………………………… |
41 |
|
|
36. |
Методы регулирования АД. …………………………………………………………………………………………………………….. |
42 |
|
|
37. |
Средства регулирования АД…………………………………………………………………………………………………………….. |
43 |
|
|
38. |
Регулирование угловой скорости асинхронного электропривода переключением числа пар полюсов. 44 |
||
|
39. |
Частотное регулирование асинхронных приводов……………………………………………………………………………. |
45 |
|
|
40. |
Электромашинный преобразователь частоты с промежуточным звеном постоянного тока с |
||
|
использованием синхронного генератора. ……………………………………………………………………………………………… |
46 |
||
|
41. |
Электромашинный преобразователь частоты с промежуточным звеном постоянного тока с |
||
|
использованием асинхронного преобразователя частоты……………………………………………………………………….. |
47 |
||
|
42. |
Вентильно-электромашинный преобразователь частоты с синхронным генератором……………………….. |
48 |
|
|
43. |
Тиристорный преобразователь частоты с непосредственной связью с сетью…………………………………….. |
49 |
|
|
44. |
Частотно-регулируемый электропривод, механические характеристики и зависимость напряжения от |
||
|
частоты. …………………………………………………………………………………………………………………………………………………. |
51 |
||
|
45. |
Оценка частотного регулирования скорости по основным показателям……………………………………………. |
52 |
|
|
46. |
Типовая схема современного преобразователя частоты, назначение её основных блоков………………… |
53 |
|
|
47. |
Схема однофазного инвертора и диаграммы поясняющие его работу на активно-индуктивную нагрузку, |
||
|
роль каждого элемента при его работе. ………………………………………………………………………………………………….. |
54 |
||
|
48. |
Схема трёхфазного инвертора и диаграммы коммутации его ключей……………………………………………….. |
55 |
|
|
49. |
Принцип широтно-импульсной модуляции в инверторе…………………………………………………………………… |
56 |
|
|
50. |
Структура однофазного инвертора с широтно-импульсной модуляцией. Диаграммы поясняющие его |
||
|
работу……………………………………………………………………………………………………………………………………………………. |
57 |
||
|
51. |
Рекуперативный тормозной режим асинхронного двигателя при питании от преобразователя частоты |
||
|
со звеном постоянного тока……………………………………………………………………………………………………………………. |
58 |
||
|
52. |
Регулирование скорости асинхронных двигателей в специальных (каскадных схемах). …………………….. |
59 |
|
|
53. |
Схема, характеристики и энергетическая диаграмма машинно-вентильного каскада………………………… |
62 |
|
|
54. |
Схема и принцип работы асинхронно-вентильного каскада. …………………………………………………………….. |
63 |
|
|
55. |
Схема и принцип работы вентильно-машинного электромеханического каскада. …………………………….. |
64 |
|
|
56. |
Схема, принцип действия и характеристики машины двойного питания. ………………………………………….. |
65 |
|
|
57. |
Переходные процессы в ЭП при постоянном и избыточном моментах. ………………. |
Ошибка! Закладка не |
|
|
определена. |
|||
|
58. |
Влияние параметров АД на переходные процессы пуска и торможения. ……………. |
Ошибка! Закладка не |
|
|
определена. |
59. Потери мощности и энергии при переходных процессах. Способы снижения потерь энергии. …Ошибка!
Закладка не определена.
2
60.Уравнения нагрева и охлаждения электродвигателя. Переходные процессы при нагреве и охлаждении.
Ошибка! Закладка не определена.
Правильные ответы на вопросы к экзамену по дисциплине «Электропривод»
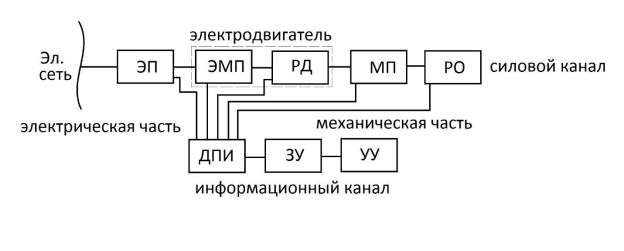
1.Дайте определение электропривода (ЭП) и приведите его функциональную схему.
Электроприводом называется электромеханическая система предназначенная для приведения в движение рабочих органов машин и управления, выполняемыми ими техническими процессами и состоящая из электрического преобразователя, механического преобразователя, электромеханического преобразователя и устройства управления.
Рисунок 1 Функциональная схема электропривода
ЭП – электропреобразователь;
ЭМП – электромагнитный преобразователь;
РД – ротор двигателя;
МП – механический преобразователь;
РО – рабочий орган;
ДПИ – датчик преобразования информации;
ЗУ – задающее устройство;
УУ – устройство управления.
Силовой канал обеспечивает преобразование электрической энергии, поступающей из системы электроснабжения в механическую энергию со своими параметрами.
1)Электрический преобразователь (ЭП) предназначен для преобразования энергии сети с соответствующими параметрами;
2)электромеханический преобразователь (ЭМП) преобразовывает электрическую энергию в механическую;
3)механический преобразовывает (МП) механическую от вала двигателя в энергию рабочей машины с заданными параметрами.
Информационный канал включает в себя датчики преобразователя информации (ДПИ), задающее устройство (ЗУ), управляющее устройство (УУ). Осуществляет управление потоком энергии, сбор и обработку информации о состоянии функционирования системы, диагностику её неисправностей.
3
2.Кратко о этапах и истории развития ЭП.
История электропривода начинается с первой половины XIX века.
В1834 — 1838 гг. русский академик Б. С. Якоби сконструировал первый электродвигатель, с помощью которого был осуществлен первый электропривод. Однако, в те времена отсутствие экономичных источников энергии не позволило внедрить электропривод в промышленность.
В50 — 60 годах XIX века некоторое распространение получил электродвигатель французского электротехника Фромана, приводивший в движение типографские и ткацкие станки.
Прогрессивную роль в развитии электропривода сыграло изобретение в 1860 г. итальянским ученым А. Пачинотти электродвигателя с кольцевым якорем.
Появление переменного однофазного тока не привели к заметным сдвигам в области электропривода вследствие того, что электродвигатели однофазного тока не имели пускового вращающего момента.
В 1889 году с появлением системы трёхфазного тока русским инженером М. О. Доливо-Добровольским был создан трёхфазный асинхронный двигатель.
Полученные преимущества централизованного производства электроэнергии и простота её распределения привели к широкому промышленному применению электропривода.
В дальнейшем, развитие электропривода всегда шло в направлении сближения двигателя с производственным механизмом и вытеснения промежуточных передач.
(Общий курс электропривода)
5
3.Классификация ЭП.
По способу распределения механической энергии:
1.Групповой (обеспечивает движение нескольких рабочих органов одной или нескольких машин);
2.Индивидуальный (обеспечивает движение одного исполнительного органа);
3.Особый индивидуальный (отличается тем, что конструктивно объединён с рабочим органом и не может быть использован для других приводов);
4.Взаимосвязанный (когда два или несколько электрически или механически связанных между собой электродвигателя обеспечивают заданное количество скоростей, нагрузок двигателей);
5.Многодвигательный (взаимосвязанный электропривод, двигатели которого работают на
1 вал).
По виду движения электроприводы могут обеспечить:
1.Вращательное движение;
2.Поступательное движение.
По степени управляемости электропривод может быть:
1.Нерегулируемый (используется для привидения в действие исполнительного органа рабочей машины с одной рабочей скоростью, параметры привода изменяются только в результате возмущающих воздействий);
2.Регулируемый (привод для сообщения изменяемой скорости исполнительному органу машины, при этом параметры привода могут изменяться под воздействием управляющего устройства);
3.Программно-управляемый (осуществляет перемещение рабочих органов в заранее заданной программе);
4.Следящий (автоматически отрабатывающий перемещение исполнительного органа рабочей машины с определённой точностью в соответствии с задающим сигналом);
5.Адаптивный (автоматически избирающий структуру или параметры системы управления при изменении условий работы машины с целью выработки оптимального режима).
По роду передаточного устройства:
1.Редукторный (в котором электродвигатель передаёт вращательное движение передаточному устройству, содержащему редуктор);
2.Безредукторный.
По уровню автоматизации:
1.Неавтоматизированный (в котором управление ручное);
2.Автоматизированный (обеспечивает автоматическое регулирование заданных параметров);
3.Автоматический (в котором управляющее воздействие вырабатывается автоматическим устройством без участия оператора).
(Конспект лекций)
6
4.Основные требования к ЭП.
Электропривод должен быть:
1)Надежным (выполнять свои функции в течение длительного времени).
2)Точным (осуществлять заданные функции с необходимой точностью).
3)Быстродействующим (способным быстро реагировать на различные воздействия).
4)Энергоэффективным (обладать наименьшими потерями энергии).
5)Совместимым (с системой электрического снабжения при внедрении электропривода большой мощности).
6)качество процессов – обеспечивают опред. закономерностей и их протекания во времени
7)Ресурсоемкость-материалоемкость и энергоемкость заложенная в конствукцию и технолог. Производства, трудоёмкость изготовления, эксплуатации, ремонта
7
5.Основные направления развития ЭП.
4 направления развития ЭП сформулированы в 1930 году на международном энергетическом конгрессе. Согласно им, электропривод развивается:
1.по пути наибольшего приближения электродвигателя к рабочему валу машины;
2.в сторону регулирования скорости;
3.в сторону экономичности;
4.в сторону удобства управления повышения информатизации процесса.
(Конспект лекций)
8
6.Основные преимущества ЭП.
Высокий КПД. (75-90 % против 28% у ДВС).
Обратимость (возможность работать в режиме двигателя и генератора).
При изменении нагрузки изменяется потребляемая мощность.
Экологичность
Безопасность (ЭП менее пожароопасен).
Относительная простота устройства.
Максимальная приближённость к рабочему органу.
Позволяет реализовывать различные законы движения, их легче автоматизировать
ЭД имеет Мпуск.
9
7.Характеристики моментов действующих в ЭП. (Стр. 26)
Моменты сопротивления можно разделить на две категории: 1) реактивные моменты и 2) активные или потенциальные моменты.
В первую категорию включаются моменты сопротивления от сжатия, резания, моменты трения и т.п., препятствующие движению привода и изменяющие свой знак при изменении направления вращения.
Во вторую категорию входят моменты от силы тяжести, а также от растяжения, сжатия и скручивания упругих тел. Эти моменты могут быть названы потенциальными, поскольку они связаны с изменением потенциальной энергии отдельных элементов привода.
Приведение моментов сопротивления от одной оси вращения к другой может быть произведено на основании энергетического баланса системы. На основании равенства мощностей получим:
Откуда:
При рассмотрении режимов работы привода, удобно относить все моменты сил к валу двигателя. Бывают : вращающий момент, статический момент Динамический Мдин=М±Мст
10
Соседние файлы в предмете Электрические машины
- #
- #
- #
- #
1.Вопрос
Электроприводом называется электромеханическая система,
предназначенная для преобразования электрической энергии в механическую энергию
вращательного либо поступательного движения исполнительного органа (ИО) рабочей
машины (РМ) и управления этим движением в целях осуществления технологического
процесса.
Рабочая машина – машина,
осуществляющая изменение формы, свойств, состояния и положения предметов труда.
Исполнительный орган
рабочей машины – движущийся элемент рабочей машины, выполняющий технологическую
операцию.
Структурная
схема электропривода приведена на рис. 1.
Рис. 1
На
рисунке 1 ИЭЭ – источник электрической энергии.
Составные
части ЭП:
1)
Электрический двигатель ЭД;
2)
Силовой преобразователь П,
предназначенный для преобразования напряжения сети ![]() в
в
напряжение другой величины и (или) частоты.
На практике используются электромашинные преобразователи, управляемые
выпрямители, преобразователи частоты, коммутаторы напряжения. В простейшем ЭП
силовой преобразователь может отсутствовать. В этом случае электродвигатель
получает энергию непосредственно от сети.
3)
Механическое передаточное
устройство МПУ, предназначенное для передачи механической энергии от двигателя
к рабочему механизму;
Виды МПУ: редуктор,
винт — гайка, барабан — трос, ременная передача, зубчато-реечная передача,
кривошипно-шатунный механизм, электромагнитные муфты.
4)
Управляющее устройство,
предназначенное для формирования управляющих воздействий в электроприводе. В
качестве такового используются релейные схемы управления, регуляторы,
микропроцессорные средства управления.
5)
Датчики обратных связей по
регулируемым координатам или возмущениям.
б) по виду движения
1. Эп вращательного движения – обеспечивает вращательное движение
исполнительного органа рабочей машины;
2. ЭП поступательного движения — обеспечивает поступательное линейное
движение исполнительного органа рабочей машины;
3. ЭП возвратно-поступательного (вибрационного) движения —
обеспечивает возвратно-поступательное (вибрационное) движение исполнительного
органа рабочего механизма;
4.ЭП непрерывного движения — обеспечивает непрерывное движение
исполнительного органа рабочей машины;
5. ЭП дискретного движения — обеспечивает дискретное перемещение
исполнительного органа рабочей машины;
6. Реверсивный ЭП – обеспечивает движение исполнительного органа
рабочей машины в любом из двух противоположных направлений;
7. Нереверсивный ЭП — обеспечивает движение исполнительного органа
рабочей машины только в одном направлении;
8. Моментный ЭП – обеспечивает заданный момент или усилие на
исполнительном органе рабочей машины.
2.Вопрос
в) по наличию и
характеру передаточного устройства
1. Редукторный ЭП – в котором передача механической энергии от
двигателя к исполнительному органу рабочей машины осуществляется посредством
редуктора;
2. Безредукторный ЭП — в котором передача механической энергии от
двигателя к исполнительному органу рабочей машины осуществляется либо
непосредственно, либо через передаточное устройство, не содержащее редуктор.
г) по степени важности выполняемых операций
1. Главный ЭП — обеспечивает движение двигателя к исполнительному
органу рабочей машины, выполняющего главную технологическую операцию;
2. Вспомогательный ЭП — обеспечивает движение исполнительного органа
рабочей машины, выполняющего вспомогательную технологическую операцию.
д) по роду тока
1. ЭП постоянного тока;
2. ЭП переменного тока.
е) по виду силового преобразователя
1. ЭП с электромашинным преобразователем;
2. ЭП с полупроводниковыми преобразователями. Последние, в свою
очередь, делят на транзисторные преобразователи и тиристорные
преобразователи.
ж) по виду электрического двигателя
1. ЭП с двигателем постоянного тока;
2. Асинхронный ЭП;
3. Синхронный ЭП;
4. ЭП с шаговыми двигателями.
3. Вопрос
з)
по степени управляемости движения
1. Нерегулируемый ЭП – параметры движения исполнительного органа
рабочей машины изменяются только из-за возмущающих воздействий. В качестве
нерегулируемых используются электроприводы с асинхронными короткозамкнутыми
двигателями и релейно-контакторными устройствами пуска и торможения;
2. Регулируемый ЭП — параметры движения исполнительного органа
рабочего механизма могут изменяться под воздействием управляющего устройства.
и) по степени автоматизации
1. Неавтоматизированный ЭП – в котором все операции управления
выполняет человек (оператор);
2. Автоматизированный ЭП — часть операций управления в котором
выполняют соответствующие устройства управления без участия оператора;
3. Автоматический ЭП – все операции управления вырабатываются
автоматически действующим устройством (регулятором) без участия оператора.
Например, ЭП промышленных манипуляторов и роботов.
к) по принципу управления
1. ЭП с разомкнутой системой управления – ЭП, в котором отсутствует
обратная связь по регулируемой координате или по возмущению;
2. ЭП с замкнутой системой управления – ЭП, в котором имеется
обратная связь по регулируемой координате или по возмущению.
л) по задаче управления
1. Программно-управляемый ЭП – в котором параметры движения
исполнительного органа рабочей машины регулируются во времени в соответствии с
заданной программой;
2. Следящий ЭП — в котором параметры движения исполнительного органа
рабочей машины регулируются во времени в соответствии с произвольно меняющимся
сигналом управления;
3. Позиционный ЭП – в котором регулируется положение (угловое или
линейное) исполнительного органа рабочей машины;
4. Адаптивный ЭП – автоматически изменяющий структуру и/или параметры
системы управления с целью сохранения заданных показателей качества
функционирования при изменении условий функционирования (возмущающих
воздействий) в широких пределах.
1. ЭЛЕКТРОПРИВОД
вопросы к экзамену и литература
2. ЛИТЕРАТУРА
3. Литература по электроприводу
1. Чиликин М.Г. Общий курс электропривода: учеб. пособие/ М.Г.
Чиликин А.С., Сандлер- Москва: Энергоиздат, 1981. — 576 с.
2. Москаленко В.В. Электрический привод: Учебник для
электротехн. спец. / В. В. Москаленко. — Москва : Высш. шк., 1991. 430с.
3. Дайнеко, В.А. Электрооборудование сельскохозяйственнных
предприятий / В.А. Дайнеко, А.И. Ковалинский. — Минск : Новое
знание, 2008. — 314 с.
4. Фоменков А.П. Электропривод сельскохозяйственных машин,
агрегатов и поточных линий: учебник для высш. учеб. заведений/
А.П. Фоменков.- Москва: Колос, 1984.-288с.
5. Москаленко В.В. Автоматизированный электропривод: Учебник для
электротехн. спец. / В. В. Москаленко. — Москва: Энргоатомиздат,
1986.-416 с.
6. Ильинский И.Ф. Общий курс электропривода: учебник для вузов / И.
Ф. Ильинский, В. Ф. Козаченко. — М.: Энергоатомиздат, 1992. — 544с
7. ЭЛЕКТРОПРИВОД. Часть 1. Проектирование нерегулируемого
электропривода рабочей машины . Гурин В.В., Бабаева Е.В. БГАТУ,
2006 г.
8. ГОСТ 16593-79. Электроприводы. Термины и определения. -Москва:
Издательство стандартов, 1980- 80 с.
4. Вопросы к экзамену
1. Определение понятия «Электропривод».
Структурная схема электропривода.
2. Классификация электроприводов.
Преимущества ЭП перед другими видами
привода.
3. Механические характеристики рабочих машин.
4. Механические и электромеханические
характеристики электродвигателей. Жесткость
механических характеристик.
5. Расчет и построение механической
характеристики асинхронного электродвигателя
по паспортным данным.
5. ВОПРОСЫ К ЭКЗАМЕНУ
6. Кинематические и расчетные схемы
электропривода. Определение приведенных
моментов сопротивления и инерции.
7. Определение времени разбега и торможения
электропривода с асинхронным
электродвигателем.
8. Выбор электродвигателей по мощности с
учетом режима их работы.
9. Энергетика электропривода. Регулирование
координат асинхронного электродвигателя.
10. Автоматизированное управление
электроприводом. Понятие разомкнутых и
замкнутых систем электропривода.
6. Вопросы к экзамену
11. Замкнутая система ЭП с обратной
связью по скорости.
12. Способы пуска АД. Пуск и реверс АД.
13. Регулирование скорости АД.
14. Принцип частотного регулирования
скорости АД.
15. Механические характеристики АД при
частотном регулировании.
7. Вопросы к экзамену
16. Преобразователи частоты для
регулируемого электропривода.
Функциональная схема преобразователя
частоты со звеном постоянного тока.
17. Выбор электродвигателя по мощности для
режима S1.
18. Выбор электродвигателя по мощности для
режима S2.
19. Выбор электродвигателя по мощности для
режима S3.
20. Надежность электроприводов.
Коэффициентный метод расчета надежности ЭП
8. Вопросы к экзамену
21. Пути повышения экономичности и
надежности электроприводов
сельскохозяйственных машин.
22. Особенности работы
электроприводов в условиях сельского
хозяйства.
23. Приводные характеристики рабочих
машин.
24. Электропривод с однофазным
асинхронным электродвигателем.
25. Приводные характеристики
электроприводов насосных установок.
9. Вопросы к экзамену
26. Выбор типа и мощности
электродвигателей водоснабжающих
установок.
27. Регулирование подачи насосных
установок.
28. Приводные характеристики
вентиляторов.
29. Регулирование подачи вентиляторов.
30. Выбор мощности электродвигателей
для привода вентиляционных установок.
10. Вопросы к экзамену
32. Особенности электроприводов
кормоприготовительных машин. Способы
облегчения пуска электродвигателей
кормоприготовительных машин.
33. Приводные характеристики измельчителей
кормов.
34. Нагрузочные диаграммы дробилок зерна.
Определение мощности дробильных машин.
Удельная мощность измельчения.
35. Управление электроприводами зерносушилок
(электропривод теплогенераторов, выгрузных и
загрузочных устройств)
36. Электропривод доильных установок и машин
первичной обработки молока. Электропривод
вакуумного насоса.
37. Электропривод холодильных машин.
38. Электропривод сепараторов молока
11. ЭЛЕКТРОПРИВОД
Определение понятия «Электропривод».
Структурная схема электропривода.
Классификация электроприводов.
Электроприводом называется
электромеханическая система, состоящая
из электродвигательного,
преобразовательного, передаточного и
управляющего устройств,
предназначенная для приведения в
движение рабочих органов машин и
управления этим движением. (по ГОСТ
16593-79).
12. Классификация электроприводов
Электропривод (ЭП) бывает групповой, индивидуальный и
взаимосвязанный.
В групповом приводе один электродвигатель приводит в
движение с помощью разветвленной передачи группу
механизмов или группу рабочих органов одного механизма.
Кинематическая схема такого привода оказывается
громоздкой, а сам привод неэкономичен, поэтому находит
ограниченное применение.
В индивидуальном приводе электродвигатель приводит
в движение только один рабочий орган.
Кинематическая схема механизма с индивидуальным
приводом существенно упрощается, повышается
экономичность и снижается металлоемкость механизма.
Электродвигатель может встраиваться непосредственно в
механизм.
Взаимосвязанный привод обеспечивает работу одного
механизма при помощи нескольких электродвигателей.
13.
3
6
2
Uу
Uз
4
Uос
5
1
9
8
7
Структурная схема электропривода.
1 – электродвигатель; 2 – силовой преобразователь;
3 – источник электроэнергии; 4 – блок управления;
5 – система управления; 6 – электропривод;
7 – исполнительный орган; 8 – рабочая машина;
9 – передаточное устройство.
14. Классификация ЭП
• По характеру движения электроприводы
бывают вращательные и линейные; по
направлению вращения – реверсивные и
нереверсивные.
• По принципу действия электродвигательного
устройства ЭП бывают: непрерывного
действия (подвижные части ЭД в
установившемся режиме находятся в
состоянии непрерывного движения) и
дискретного действия (подвижные части
находятся в состоянии дискретного
движения).
15. Классификация ЭП
• По роду тока ЭП разделяются на приводы
постоянного и переменного тока.
• По характеру изменения параметров ЭП могут быть
регулируемыми и нерегулируемыми; параметры
регулируемых электроприводов изменяются под
воздействием регулирующего устройства,
нерегулируемых – в результате возмущающих
воздействий.
• Электропривод может получать питание от сети, а
может быть автономным, т.е. получать питание от
аккумуляторов или от теплового двигателя (дизельэлектрический или турбоэлектрический привод).
• По виду преобразовательного устройства ЭП
разделяются на вентильные, тиристорные,
транзисторные и с преобразователями частоты.
16. Классификация ЭП
• По выполняемым функциям электроприводы
бывают автоматизированными и
неавтоматизированными.
Автоматизированные ЭП делятся на
программно-управляемые, следящие,
позиционные и адаптивные (автоматически
избирающие структуру или параметры
системы регулирования при изменениях
условий работы).
• По виду связей с исполнительным органом
рабочей машины существуют
безредукторные, редукторные,
маховиковые и электрогидравлические ЭП.
17. Преимущества ЭП
• По сравнению с другими видами привода рабочих
машин электропривод имеет следующие
преимущества:
• электродвигатели имеют высокий к.п.д. – 75…90%
против 28…34% у тепловых двигателей;
• электродвигатели обладают повышенным пусковым
моментом;
• электродвигатели проще по устройству, безопаснее и
дешевле ДВС;
• электропривод легко автоматизируется и
управляется:
• электропривод легко приблизить к рабочему органу
или встроить в исполнительный механизм.
18. Механические характеристики рабочих машины
19. Механические характеристики рабочих машин
• Если х = 0, то получаем
механическую характеристику, не
зависящую от скорости, для которой
М = Мсн Такая характеристика у
подъемных кранов, лебедок. К этой
группе могут быть отнесены
механизмы, у которых основное
сопротивление создают силы трения
(навозоуборочные транспортеры,
кормораздатчики, шнеки, конвейеры,
барабаны сушилок, триеры).
20. Механические характеристики рабочих машин
• При х=1 получается линейно-возрастающая
характеристика Ею обладают многие
машины, у которых основные сопротивления
создаются силами трения совместно с
аэродинамическими (молотилки, дробилки
кормов, лесопильные рамы,
зерноочистительные машины). Иногда такая
характеристика называется генераторной, так
как она присуща генераторам постоянного
тока независимого возбуждения при
постоянной нагрузке.
21. Механические характеристики рабочих машин
• Если х=2, то момент сопротивления
пропорционален квадрату угловой скорости
(рис. 1.5). Такая характеристика
называется вентиляторной. Так изменяется
момент сопротивления вентиляторов,
компрессоров, центробежных насосов,
сепараторов, пневматических транспортеров
и других механизмов, принцип работы
которых основан на законах аэро- и
гидродинамики
22. Механические характеристики рабочих машин
• Если х = -1, получается нелинейно
спадающая характеристика, для
которой момент сопротивления
изменяется обратно пропорционально
скорости, а мощность остается
постоянной ( металлорежущие станки,
у которых с увеличением подачи
скорость вращения деталей
уменьшается).
23.
24. Механические и электромеханические характеристики электродвигателей. Жесткость механических хатактеристик
• Механической характеристикой электродвигателя
называется зависимость скорости от электромагнитного
момента, развиваемого электродвигателем в
установившемся режиме, то есть = f (M).
Механические характеристики электродвигателей могут быть
представлены как M = f( ).
Различают естественную и искусственную характеристики электродвигателей.
Естественная характеристика соответствует основной схеме включения
электродвигателя и номинальным параметрам питающего напряжения.
Если двигатель включен не по основной схеме, или в его электрические цепи
включены дополнительные элементы, или же двигатель питается
напряжением с неноминальными параметрами, то он будет иметь
искусственные характеристики.
Таких характеристик может быть сколь угодно много; иногда они называются
регулировочными.
25. Механические и электромеханические характеристики электродвигателей. Жесткость механических характеристик
• Качественно механические характеристики
электродвигателя оцениваются жесткостью ,
определяемой как
= dM/d M/
Используя этот показатель, можно оценивать характеристику
1 синхронного электродвигателя на рис. как абсолютно
жесткую, характеристику асинхронного электродвигателя 3
– как имеющую переменную жесткость, характеристику 2
электродвигателя постоянного тока независимого
возбуждения как жесткую, характеристику 4
электродвигателя постоянного тока последовательного
возбуждения – как мягкую.
26. МЕХАНИЧЕСКИЕ ХАРАКТЕРИСТИКИ ЭЛЕКТРОДВИГАТЕЛЕЙ
1
2
4
3
М
.
Рис. Механические характеристики электродвигателей 1- абсолютно жесткая
Используя механические характеристики исполнительных
органов и электродвигателей можно выполнять проверку
условия установившегося движения электропривода
.
Для этого в одном квадранте совмещаются характеристики электродвигателя
1 и исполнительного органа 2
27.
28. КИНЕМАТИЧЕСКИЕ И РАСЧЕТНЫЕ СХЕМЫ ЭЛЕКТРОПРИВОДА. ОПРЕДЕЛЕНИЕ ПРИВЕДЕННЫХ МОМЕНТОВ СОПРОТИВЛЕНИЯ И ИНЕРЦИИ
29. КИНЕМАТИЧЕСКИЕ И РАСЧЕТНЫЕ СХЕМЫ ЭЛЕКТРОПРИВОДА. ОПРЕДЕЛЕНИЕ ПРИВЕДЕННЫХ МОМЕНТОВ СОПРОТИВЛЕНИЯ И ИНЕРЦИИ
30. КИНЕМАТИЧЕСКИЕ И РАСЧЕТНЫЕ СХЕМЫ ЭЛЕКТРОПРИВОДА. ОПРЕДЕЛЕНИЕ ПРИВЕДЕННЫХ МОМЕНТОВ СОПРОТИВЛЕНИЯ И ИНЕРЦИИ
31. КИНЕМАТИЧЕСКИЕ И РАСЧЕТНЫЕ СХЕМЫ ЭЛЕКТРОПРИВОДА. ОПРЕДЕЛЕНИЕ ПРИВЕДЕННЫХ МОМЕНТОВ СОПРОТИВЛЕНИЯ И ИНЕРЦИИ
32. КИНЕМАТИЧЕСКИЕ И РАСЧЕТНЫЕ СХЕМЫ ЭЛЕКТРОПРИВОДА. ОПРЕДЕЛЕНИЕ ПРИВЕДЕННЫХ МОМЕНТОВ СОПРОТИВЛЕНИЯ И ИНЕРЦИИ
33. КИНЕМАТИЧЕСКИЕ И РАСЧЕТНЫЕ СХЕМЫ ЭЛЕКТРОПРИВОДА. ОПРЕДЕЛЕНИЕ ПРИВЕДЕННЫХ МОМЕНТОВ СОПРОТИВЛЕНИЯ И ИНЕРЦИИ
34. КИНЕМАТИЧЕСКИЕ И РАСЧЕТНЫЕ СХЕМЫ ЭЛЕКТРОПРИВОДА. ОПРЕДЕЛЕНИЕ ПРИВЕДЕННЫХ МОМЕНТОВ СОПРОТИВЛЕНИЯ И ИНЕРЦИИ
35. ОПРЕДЕЛЕНИЕ ВРЕМЕНИ РАЗБЕГА И ТОРМОЖЕНИЯ ЭЛЕКТРОПРИВОДА
36. ОПРЕДЕЛЕНИЕ ВРЕМЕНИ РАЗБЕГА И ТОРМОЖЕНИЯ ЭЛЕКТРОПРИВОДА
37.
38.
39. МЕХАНИЧЕСКАЯ И ЭЛЕКТРОМЕХАНИЧЕСКАЯ ХАРАКТЕРИСТИКИ АД
40. МЕХАНИЧЕСКАЯ И ЭЛЕКТРОМЕХАНИЧЕСКАЯ ХАРАКТЕРИСТИКИ АД
41. МЕХАНИЧЕСКАЯ И ЭЛЕКТРОМЕХАНИЧЕСКАЯ ХАРАКТЕРИСТИКИ АД
42. МЕХАНИЧЕСКАЯ И ЭЛЕКТРОМЕХАНИЧЕСКАЯ ХАРАКТЕРИСТИКИ АД
43. МЕХАНИЧЕСКАЯ И ЭЛЕКТРОМЕХАНИЧЕСКАЯ ХАРАКТЕРИСТИКИ АД
44. МЕХАНИЧЕСКАЯ И ЭЛЕКТРОМЕХАНИЧЕСКАЯ ХАРАКТЕРИСТИКИ АД
45. Номинальный и пусковой ток АД
46. Перегрузочная способность АД. Снижение пускового тока АД
47. Снижение пусковых токов АД
48. ПУСК АД
49. ОСНОВНЫЕ ЭНЕРГЕТИЧЕСКИЕ РЕЖИМЫ АД
50. ОСНОВНЫЕ ЭНЕРГЕТИЧЕСКИЕ РЕЖИМЫ АД
51. Тормозные режимы асинхронного электродвигателя
52. Динамическое торможение АД
53. Динамическое торможение АД
54. Расчет и построение механической характеристики АД по паспортным данным
55. Расчет и построение механической характеристики АД по паспортным данным
56. Расчет и построение механической характеристики АД по паспортным данным
57. ПРИМЕР РАСЧЕТА МЕХАНИЧЕСКОЙ ХАРАКТЕРИСТИКИ АД
58. ПРИМЕР РАСЧЕТА МЕХАНИЧЕСКОЙ ХАРАКТЕРИСТИКИ АД
59. ПРИМЕР РАСЧЕТА МЕХАНИЧЕСКОЙ ХАРАКТЕРИСТИКИ АД
60. РАСЧЕТ ЭЛЕКТРОМЕХАНИЧЕСКОЙ И МЕХАНИЧЕСКОЙ ХАРАКТЕРИСТИК АД ПО ПАСПОРТНЫМ ДАННЫМ
61. РАСЧЕТ ЭЛЕКТРОМЕХАНИЧЕСКОЙ И МЕХАНИЧЕСКОЙ ХАРАКТЕРИСТИК АД ПО ПАСПОРТНЫМ ДАННЫМ
62. ЭЛЕКТРОМЕХАНИЧЕСКАЯ ХАРАКТЕРИСТИКА АД
63. ПРИМЕР ПОСТРОЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ И МЕХАНИЧЕСКОЙ ХАРАКТЕРИСТИК АД
64. ПРИМЕР ПОСТРОЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ И МЕХАНИЧЕСКОЙ ХАРАКТЕРИСТИК АД
65. ПРИМЕР ПОСТРОЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ И МЕХАНИЧЕСКОЙ ХАРАКТЕРИСТИК АД
66. ПРИМЕР ПОСТРОЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ И МЕХАНИЧЕСКОЙ ХАРАКТЕРИСТИК АД
67. ПРИМЕР ПОСТРОЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ И МЕХАНИЧЕСКОЙ ХАРАКТЕРИСТИК АД
68. ЭНЕРГЕТИКА ЭЛЕКТРОПРИВОДА.
69. ПОТЕРИ МОЩНОСТИ В ЭЛЕКТРОПРИВОДЕ
70. ПОТЕРИ МОЩНОСТИ В ЭЛЕКТРОПРИВОДЕ
71. ПОТЕРИ МОЩНОСТИ В ЭЛЕКТРОПРИВОДЕ
72. ЭНЕРГЕТИКА ЭЛЕКТРОПРИВОДА. КОЭФФИЦИЕНТ МОЩНОСТИ ЭП
73. КОЭФФИЦИЕНТ МОЩНОСТИ ЭП
74. КОЭФФИЦИЕНТ МОЩНОСТИ ЭП
75. КОЭФФИЦИЕНТ МОЩНОСТИ ЭП
76.
77.
78. ЭНЕРГЕТИКА ЭЛЕКТРОПРИВОДА. ПУТИ ЭКОНОМИИ ЭНЕРГИИ В ЭП
79. РЕГУЛИРОВАНИЕ КООРДИНАТ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ (регулирование скорости)
80. РЕГУЛИРОВАНИЕ КООРДИНАТ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ (регулирование скорости)
81. РЕГУЛИРОВАНИЕ КООРДИНАТ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ (регулирование скорости)
82. РЕГУЛИРОВАНИЕ КООРДИНАТ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ (регулирование скорости)
83. РЕГУЛИРОВАНИЕ КООРДИНАТ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ (регулирование скорости)
84. РЕГУЛИРОВАНИЕ КООРДИНАТ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ (регулирование скорости)
85. РЕГУЛИРОВАНИЕ КООРДИНАТ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ (регулирование скорости)
86. РЕГУЛИРОВАНИЕ КООРДИНАТ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ (регулирование скорости)
87. РЕГУЛИРОВАНИЕ КООРДИНАТ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ (регулирование скорости)
88. Регулирование скорости АД. Принцип частотного регулирования скорости.
89. Регулирование скорости АД. Принцип частотного регулирования скорости.
90. Преобразователи частоты для регулируемого электропривода
91. Преобразователи частоты для регулируемого электропривода
92. Преобразователи частоты для регулируемого электропривода
93. Преобразователи частоты для регулируемого электропривода
94. Преобразователи частоты для регулируемого электропривода
95. Преобразователи частоты для регулируемого электропривода
96. Преобразователи частоты для регулируемого электропривода
97. Преобразователи частоты для регулируемого электропривода
98. Преобразователи частоты для регулируемого электропривода
99. Преобразователи частоты для регулируемого электропривода
100. Преобразователи частоты для регулируемого электропривода
101. ВЫБОР ЭЛЕКТРОДВИГАТЕЛЕЙ ПО МОЩНОСТИ С УЧЕТОМ РЕЖИМА ИХ РАБОТЫ
102. ВЫБОР ЭЛЕКТРОДВИГАТЕЛЕЙ ПО МОЩНОСТИ С УЧЕТОМ РЕЖИМА ИХ РАБОТЫ
103. ВЫБОР ЭЛЕКТРОДВИГАТЕЛЕЙ ПО МОЩНОСТИ С УЧЕТОМ РЕЖИМА ИХ РАБОТЫ
104. ВЫБОР ЭЛЕКТРОДВИГАТЕЛЕЙ ПО МОЩНОСТИ С УЧЕТОМ РЕЖИМА ИХ РАБОТЫ
105. ВЫБОР ЭЛЕКТРОДВИГАТЕЛЕЙ ПО МОЩНОСТИ С УЧЕТОМ РЕЖИМА ИХ РАБОТЫ
106. ВЫБОР ЭЛЕКТРОДВИГАТЕЛЕЙ ПО МОЩНОСТИ С УЧЕТОМ РЕЖИМА ИХ РАБОТЫ
107. ВЫБОР ЭЛЕКТРОДВИГАТЕЛЕЙ ПО МОЩНОСТИ С УЧЕТОМ РЕЖИМА ИХ РАБОТЫ
108. ВЫБОР ЭЛЕКТРОДВИГАТЕЛЕЙ ПО МОЩНОСТИ С УЧЕТОМ РЕЖИМА ИХ РАБОТЫ
109. ВЫБОР ЭЛЕКТРОДВИГАТЕЛЕЙ ПО МОЩНОСТИ С УЧЕТОМ РЕЖИМА ИХ РАБОТЫ
110. ВЫБОР ЭЛЕКТРОДВИГАТЕЛЕЙ ПО МОЩНОСТИ С УЧЕТОМ РЕЖИМА ИХ РАБОТЫ
111. ВЫБОР ЭЛЕКТРОДВИГАТЕЛЕЙ ПО МОЩНОСТИ С УЧЕТОМ РЕЖИМА ИХ РАБОТЫ
112. ВЫБОР ЭЛЕКТРОДВИГАТЕЛЕЙ ПО МОЩНОСТИ С УЧЕТОМ РЕЖИМА ИХ РАБОТЫ
113. ВЫБОР ЭЛЕКТРОДВИГАТЕЛЕЙ ПО МОЩНОСТИ С УЧЕТОМ РЕЖИМА ИХ РАБОТЫ
114. ВЫБОР ЭЛЕКТРОДВИГАТЕЛЕЙ ПО МОЩНОСТИ С УЧЕТОМ РЕЖИМА ИХ РАБОТЫ
115. ВЫБОР ЭЛЕКТРОДВИГАТЕЛЕЙ ПО МОЩНОСТИ С УЧЕТОМ РЕЖИМА ИХ РАБОТЫ
• МЕТОД СРЕДНИХ ПОТЕРЬ
116. ВЫБОР ЭЛЕКТРОДВИГАТЕЛЕЙ ПО МОЩНОСТИ С УЧЕТОМ РЕЖИМА ИХ РАБОТЫ
117. ВЫБОР ЭЛЕКТРОДВИГАТЕЛЕЙ ПО МОЩНОСТИ С УЧЕТОМ РЕЖИМА ИХ РАБОТЫ
118. ВЫБОР ЭЛЕКТРОДВИГАТЕЛЕЙ ПО МОЩНОСТИ С УЧЕТОМ РЕЖИМА ИХ РАБОТЫ
Билеты для машин с электроприводом
Данный раздел разработан для подготовки к теоретическому экзамену правила безопасной эксплуатации машин с электроприводом (погрузчики) в органах Гостехнадзора.
Экзаменационные билеты для приема теоретического экзамена по безопасной эксплуатации самоходных машин с электроприводом взяты из официального сайта Минсельхоза РФ и соответствуют требованиям п. 29 Правил допуска к управлению самоходными машинами и выдачи удостоверений тракториста-машиниста.
Все материалы для экзамена правила безопасной эксплуатации машин с электроприводом актуальны на 2022 год. Подготовка к экзамену осуществляется посредством решения онлайн билетов, представленных ниже. Экзаменационные билеты Гостехнадзора для машин с электроприводом состоят из вопросов и нескольких вариантов ответов, среди которых один правильный. Для усвоения всего материала необходимо просмотреть все представленные ниже вопросы.
ВНИМАНИЕ! Подготовку к экзамену следует осуществлять по нижней таблице – таблице вопросов. Каждая ячейка вопросов соответствует билету, например, вопросы 1-8 – билет №1, вопросы 9-16 – билет №2 и т.д.
При необходимости Вы можете приобрести билеты в электронном виде, для этого напишите на почту profitest24@bk.ru
-
Билет №
1 -
Билет №
2 -
Билет №
3 -
Билет №
4 -
Билет №
5
-
Билет №
6 -
Билет №
7 -
Билет №
8 -
Билет №
9 -
Билет №
10
-
Билет №
11 -
Билет №
12 -
Билет №
13 -
Билет №
14 -
Билет №
15
Верхняя таблица предназначена для учебных центров в качестве платформы для проведения экзамена. Билеты Гостехнадзора в ней формируются рандомно, а также есть возможность формирования протокола (результатов) экзамена.
Нижняя таблица предназначена для подготовки к экзамену. Вопросы представлены строго по порядку и не меняются.
-
Вопросы
1
—
8 -
Вопросы
9
—
16 -
Вопросы
17
—
24 -
Вопросы
25
—
32 -
Вопросы
33
—
40
-
Вопросы
41
—
48 -
Вопросы
49
—
56 -
Вопросы
57
—
64 -
Вопросы
65
—
72 -
Вопросы
73
—
80
-
Вопросы
81
—
88 -
Вопросы
89
—
96 -
Вопросы
97
—
104 -
Вопросы
105
—
112 -
Вопросы
113
—120
Экзамен для управлениями машин с электроприводом
Экзамен на право управления машин с электроприводом сдается в органах Гостехнадзора. Экзамен состоит из двух частей: теоретическая и практическая часть. В теоретической части вам предстоит ответить на вопросы экзаменационного билета. В билете 8 вопросов с одним правильным вариантом ответа. На нашем сайте представлены экзаменационные билеты для приема теоретического экзамена по безопасной эксплуатации самоходных машин с электроприводом для подготовки к теоретической части экзамена на трактор. В практической части экзамена выполняются различные упражнения на погрузчике для подтверждения наличия знаний правил безопасной эксплуатации машин с электроприводом.